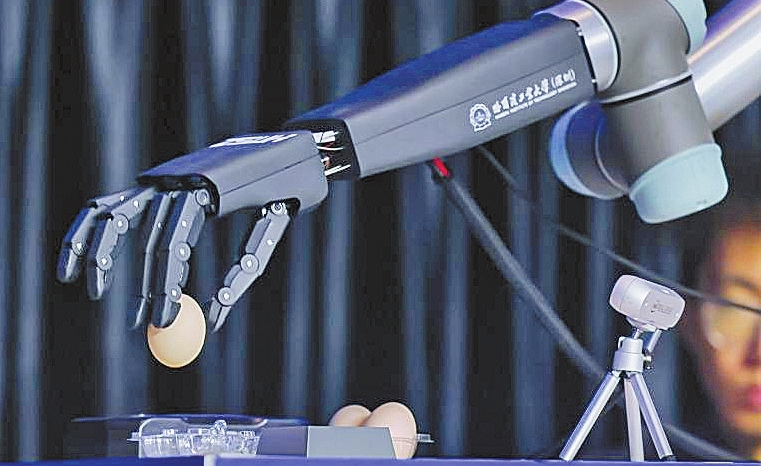
A TEAM from the Harbin Institute of Technology, Shenzhen (HITSZ) has taken first place in the creative track of the 2025 Shenzhen Intelligent Robot Agile Hand Competition, which wrapped up Tuesday. The contest, themed “Agile Innovation, Crafting the Future,” featured competitive and creative tracks to foster practical innovation and speed up the commercialization of new technologies. The winner of the competitive track is still to be announced by the organizer — the Shenzhen Municipal Science, Technology, and Innovation Commission. The HITSZ team triumphed with its “Tendon-Driven Humanoid Dexterous Hand.” Such robotic hands, which act as the “fingers” for humanoid robots to manipulate objects, are often considered the “crown jewel” of robotics due to their extreme complexity. They are highly challenging to develop and require sophisticated integration. Facing this challenge, the team opted for a fully independent, from-scratch design. “Our goal is not just to assemble components, but to truly create something original,” said team lead Peng Haoqi. Their breakthrough rests on two key innovations. The first is a novel mechanical structure that eliminates motion coupling in conventional designs, enabling agile, powerful, and precise movement. The second is the integration of proprietary fingertip tactile sensors with vision algorithms, allowing the hand to “feel,” “see,” and move beyond simple “blind grasping” toward perceptive interaction. In the finals, the hand impressed judges with its millisecond-level response speed, cost-effective modular design, and seamless dynamic grasping, securing the team the top award. (Chen Siqi) |