|
Harvard scientists have built a new type of flexible robot that is limber* enough to wiggle and worm through tight spaces.
It’s the latest prototype in the growing field of soft-bodied robots. Researchers are increasingly drawing ideas from nature to create machines that are more bendable and versatile* than those made of metal.
The Harvard team, led by chemist George M. Whitesides, borrowed from squids*, starfish and other animals without hard skeletons* to fashion a small, four-legged rubber robot that calls to mind the animation character Gumby.
In recent years, scientists have been trying to build — sometimes odd-looking — robots designed to squeeze through hard-to-reach cracks after a disaster like an earthquake or navigate uneven ground in the battlefield.
“The unique ability for soft robots to deform* allows them to go places that traditional robots cannot,” Matthew Walter, a roboticist at the Massachusetts Institute of Technology, said.
A team from Tufts University earlier this year showed off a 10-centimeter caterpillar*-shaped robot made of silicone* rubber that can curl into a ball and move itself forward.
The Harvard project, funded by the Pentagon’s research arm, was described online Monday in the journal Proceedings of the National Academy of Sciences.
The new robot, which took two months to build, is 12.7 centimeters long. Its four legs can be separately controlled by pumping air into the limbs, either manually or via computer. This gives the robot a range of motions including crawling and slithering*.
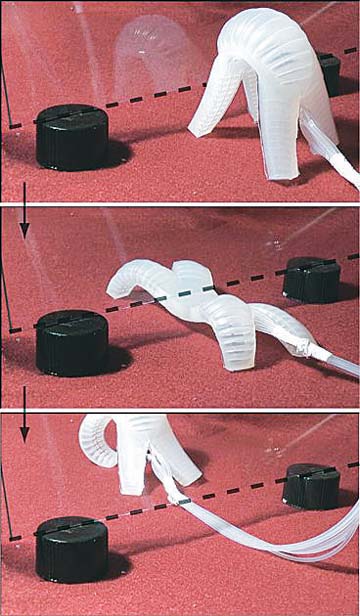
The researchers tested the robot’s flexibility by having it squirm underneath a pane of glass just three-quarters of an inch from the surface.
Scientists maneuvered the robot through the tiny gap 15 times using a combination of movements. In most cases, it took less than a minute to get from side to side.
Researchers want to improve the robot’s speed, and were pleased that it did not break from constant inflation and deflation.
There were drawbacks. The robot is linked to an external power source and scientists need to find a way to integrate the source before it can be used in the real world. (SD-Agencies)
|